ARM-PWN从入门到放弃0x00-环境准备
0x00 前言
学PWN也有一段时间了,x86/x86_64 下算是入了个门,平时接触ARM比较多,正好以ARM架构下再更加深入的学习PWN。
会用的工具、环境:
在Ubuntu 18.04/WSL2
Docker for wsl2
树莓派3B+
qemu
unicorn
IDA
Radare2
GDB+gef+pwndbg+peda
pwntools
0x01 环境安装
这里选用的有两种环境
ARM设备 树莓派
之前618买了树莓派,派上用场了。
把PI的官方系统换成了Ubuntu 18.04。
安装了GCC 、gdb、gef(经测试只有gef能用),其他也没什么需要装的。
关闭地址随机化
1 2 3 4 5 6 7 8sudo cat /proc/sys/kernel/randomize_va_space # 状态查看 2 # 开启中 sudo echo 0 > /proc/sys/kernel/randomize_va_space bash: /proc/sys/kernel/randomize_va_space: Permission denied su echo 0 > /proc/sys/kernel/randomize_va_space cat /proc/sys/kernel/randomize_va_space 0 #这就OKQEMU 模拟 (WSL2)
安装
1 2 3 4#防止又出什么乱七八糟的错误和需求,尽量都装上 apt install gdb gdb-multiarch ## apt install qemu ## apt install gcc-arm-linux-gnueabi gcc-aarch64-linux-gnu ##gcc arm 依赖库安装
0x02 启动和调试
树莓派
直接运行
进行socat绑定端口 就OK
1socat tcp-listen:6666,fork exec:./binfileQEMU
- 32bit
1 2 3 4 5 6 7 8# 本地GDB调试 qemu-arm -g 1234 -L /usr/arm-linux-gnueabi ./binfile gdb-multiarch target remote localhost:1234 # 绑定运行到指定端口 远程调试 socat tcp-l:10002,fork exec:"qemu-arm -L /usr/arm-linux-gnueabi ./binfile",reuseaddr & # + -g 方便调试 socat tcp-l:10002,fork exec:"qemu-arm -g 1234 -L /usr/arm-linux-gnueabi ./binfile",reuseaddr &- 64bit
1 2 3 4# 本地调试 -g 等待GDB调试 qemu-aarch64 -g 1111 -L /usr/aarch64-linux-gnu ./file socat tcp-l:10002,fork exec:"qemu-aarch64 -L /usr/aarch64-linux-gnu ./binfile",reuseaddr & socat tcp-l:10002,fork exec:"qemu-aarch64 -g 1234 -L /usr/aarch64-linux-gnu ./binfile",reuseaddr &
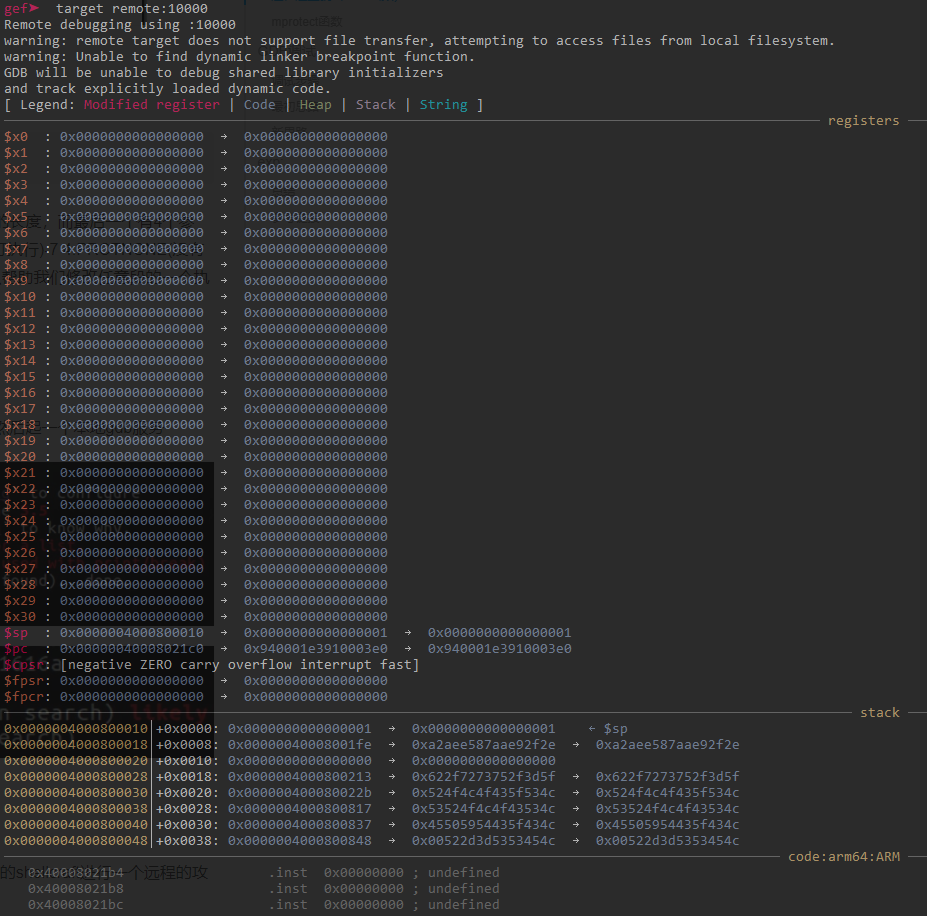
0x03 调试过程
在树莓派直接gdb调试就行。省略。。。
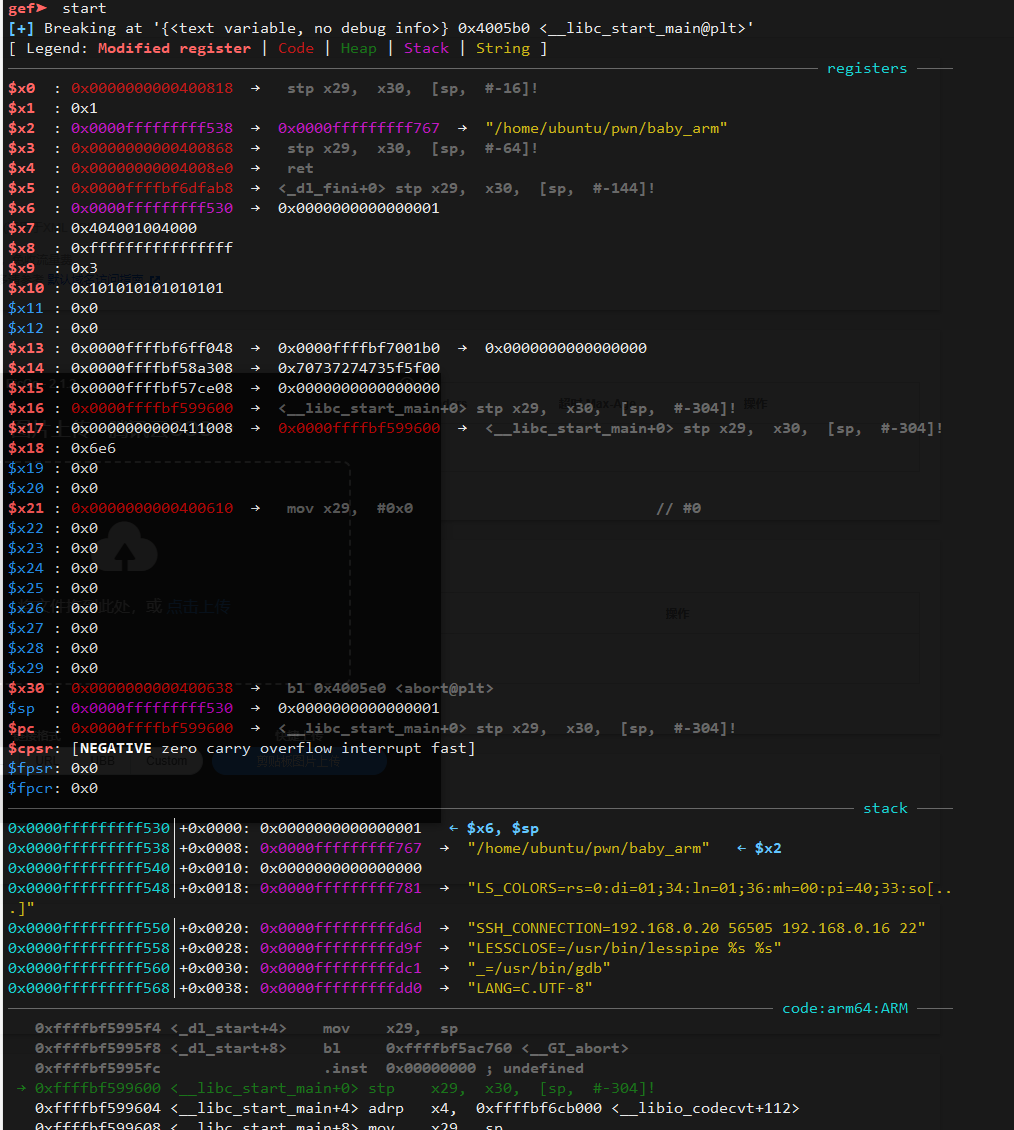
img
使用qemu+gdb-multiarch+插件进行调试步骤
qemu-aarch64 -g 10002 -L /usr/aarch64-linux-gnu ./baby_arm
| |
0x04 题目搭建
基于ctf_xinetd项目自己改了一个