ARM汇编基础(待补充)
ARM汇编基础(简)
经常忘记,做个笔记,好作复习。。
内容主要来源于《Android软件安全与逆向分析》和《逆向工程权威指南》以及 ARM 汇编 和Azeria-labs
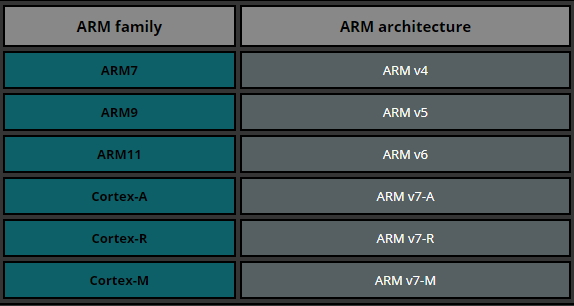
ARM架构
ARM属于RISC CPU,
ARM模式 4个字节opcode 32位
Thumb模式 2个字节opcode 16位
Thumb-2模式 同上(只是有部分4个字节的opcode)
64位ARM 4个字节opcode
ARM机器码在版本3之前是小端。但是之后默认采用大端格式,但可以设置切换到小端。
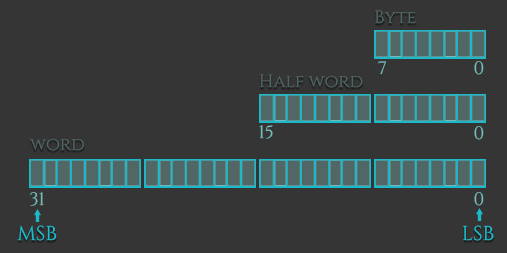
数据类型
数据类型在汇编语言中的扩展后缀为**-h或者-sh对应着半字,-b或者-sb**对应着字节,但是对于字并没有对应的扩展
| |
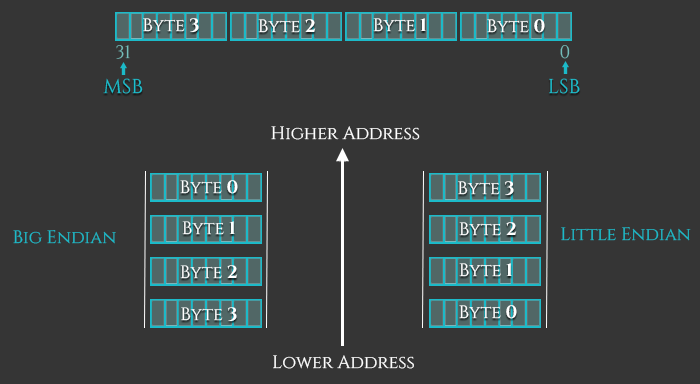
字节序
在内存中有两种字节排布顺序,大端序(BE)或者小端序(LE)。两者的主要不同是对象中的每个字节在内存中的存储顺序存在差异。一般X86中是小端序,最低的字节存储在最低的地址上。在大端机中最高的字节存储在最低的地址上。
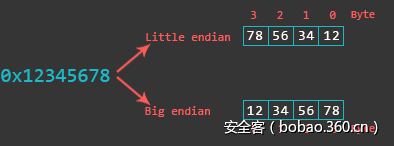
数据访问时采取大端序还是小端序使用程序状态寄存器(CPSR)的第9比特位来决定的。
寄存器
37个32位寄存器,其中31个为基础寄存器,6个为状态寄存器。
用户模式下有
不分组寄存器(R0-R7) R7一般存放系统调用号
分组寄存器(R8-R14)
程序计数器(R15)
单前程序状态寄存器(CPSR)
两种状态:
| ARM状态(32位对齐) | Thumb状态(16位对齐) |
|---|---|
| R0-R7 | R0-R7(相同) |
| CPSR | CPSR(同) |
| R11 | FP(栈帧指针) |
| R12 | IP(内部程序调用) |
| R13 | SP(栈指针) |
| R14 | LR(链接寄存器)一般存放函数返回地址 |
| R15 | PC(程序计数器) |
和x86对比:
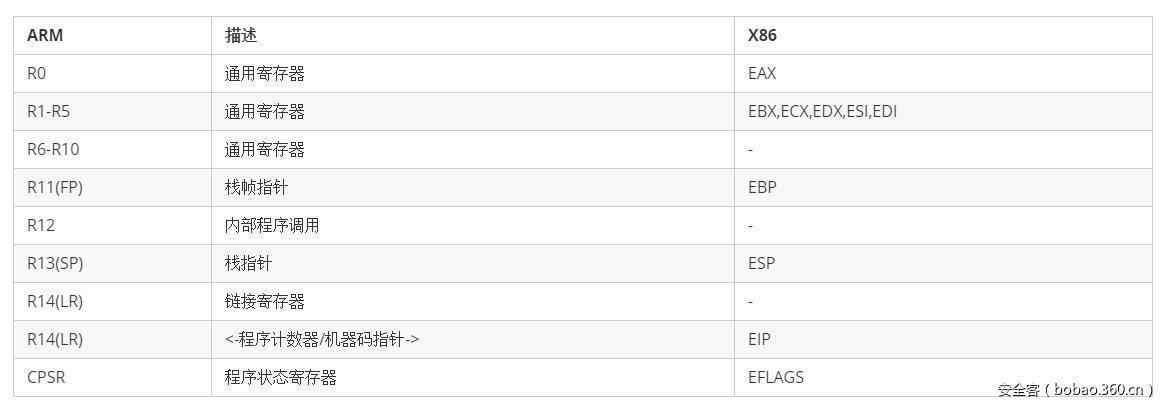
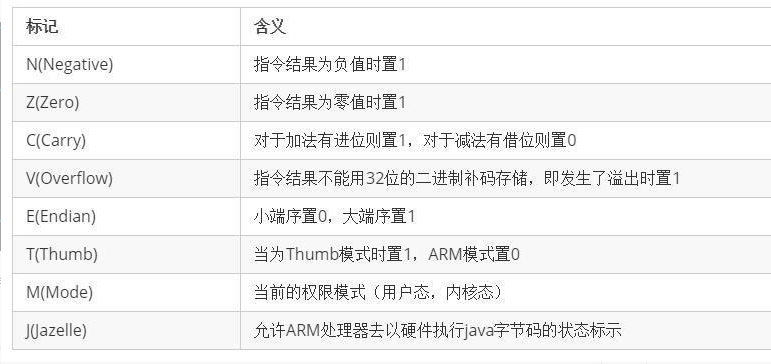
CSPR:
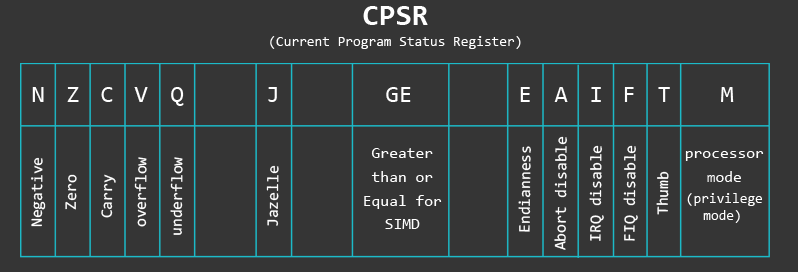
32位的CPSR寄存器的比特位含义,左边是最大比特位,右边是最小比特位。每个单元代表一个比特。
| 条件码 | 助记符后缀 | 标志 | 含义 |
|---|---|---|---|
| 0000 | EQ | Z置位 | 相等 |
| 0001 | NE | Z清零 | 不相等 |
| 0010 | CS | C置位 | 无符号数大于或等于 |
| 0011 | CC | C清零 | 无符号数小于 |
| 0100 | MI | N置位 | 负数 |
| 0101 | PL | N清零 | 正数或零 |
| 0110 | VS | V置位 | 溢出 |
| 0111 | VC | V清零 | 未溢出 |
| 1000 | HI | C置位Z清零 | 无符号数大于 |
| 1001 | LS | C清零Z置位 | 无符号数小于或等于 |
| 1010 | GE | N等于V | 带符号数大于或等于 |
| 1011 | LT | N不等于V | 带符号数小于 |
| 1100 | GT | Z清零且(N等于V) | 带符号数大于 |
| 1101 | LE | Z置位或(N不等于V) | 带符号数小于或等于 |
| 1110 | AL | 忽略 | 无条件执行 |
程序结构
Android平台采用的是GUN ARM汇编格式,汇编器为GAS
参数传递:R0-R3这4个寄存器用来传递函数调用的第1到4个参数,超出的参数通过堆栈来传递。R0还用来存放函数调用的返回值。

汇编器指令
.file:源文件名.align:代码对齐方式.ascii:声明字符串.global:声明全局符号.type:指定符号的类型.word:存放地址值.size:设置指定符号的大小.ident:编译器标识
寻址方式
立即寻址
MOV R0, #1234->R0=1234寄存器寻址
MOV R1 = R2->R0=R1寄存器移位寻址
LSL :逻辑左移,移位后寄存器空出的低位补0
LSR:逻辑右移,移位后寄存器空出的高位补0
ASR:算术右移,移位过程中符号位保持不变,若源操作数为正数,则移位后空出的高位补0,否则补1。
ROR:循环右移,移位后移出的低位填入移位空出的高位。
RRX:带扩展的循环右移,操作数右移一位,移出的空位用C标志的值填充。
MOV R0, R1, LSL #2->R1左移两位(R1«2)赋值给R0,相当于R0 = R1*4寄存器间接寻址
LDR RO, [R1]->将R1寄存器的数值作为地址,取出此地址中的值赋给R0寄存器基址寻址
多用于查表、数组访问操作。
LDR R0, [R1,#-4]->将R1寄存器的数值减4作为地址,取出此地址的值赋给R0寄存器。多寄存器寻址
一条指令最多完成16个通用寄存器值的传送。
LDMIA R0,{R1,R2,R3,R4}->LDM为数据加载指令,指令的后缀IA表示每次执行完加载操作后R0寄存器的值自增1个字,ARM指令集中,子表示的是一个32位数值。这条指令作用为:R1 = [R0],R2 = [R0+#4],R3 = [R0+#8],R4 = [R0+#12]。堆栈寻址
特定的指令来完成:
LDMFA/STMFA、LDMEA/STMEA、LDMFD/STMFD、LDMED/STMED。LDM和STM为指令前缀,表示多寄存器寻址,即一次传送多个寄存器的值。后面的后缀为指令后缀。
STMFD SP!, {R1-R7,LR}->将R1~R7,LR入栈,多用于保存子程序的现场。LDMFD SP!, {R1-R7,LR}->出栈,恢复现场。块拷贝寻址
实现从连续地址数据从存储器的某一位置拷贝到另外一个位置,指令有:
LDMIA/STMIA、LDMDA/STMDA、LDMIB/STMIB、LDMDB/STMDB。LDMIA R0! {R0-R3}从R0寄存器指向的存储单元中读取3个字到R1-R3寄存器STMIA R0! {R0-R3}存储从R1-R3寄存器的内容到R0寄存器指向的存储单元相对寻址
以程序计数器PC的当前值为基地址,指令中的地址标号作为偏移量,将两者相加之后得到操作数的有效地址。
1BL NEXT ····NEXT: ········
ARM和Thumb指令集
基本指令简述
MNEMONIC{S}{condition} {Rd}, Operand1, Operand2
助记符{是否使用CPSR}{是否条件执行以及条件} {目的寄存器}, 操作符1, 操作符2
MNEMONIC - 指令的助记符如ADD
{S} - 可选的扩展位,如果指令后加了S,则需要依据计算结果更新CPSR寄存器中的条件跳转相关 的FLAG
{condition} - 如果机器码要被条件执行,那它需要满足的条件标示
{Rd} - 存储结果的目的寄存器
Operand1 - 第一个操作数,寄存器或者是一个立即数
Operand2 - 第二个(可变的)操作数,可以是一个立即数或者寄存器或者有偏移量的寄存器
第二操作数还有如下操作:
| |
| |
内存访问相关指令
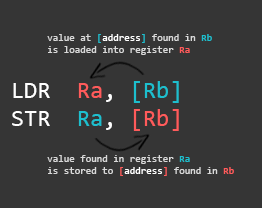
通常,LDR被用来从内存中加载数据到寄存器,STR被用作将寄存器的值存放到内存中。
例子:
| |
第一种偏移形式:立即数作偏移
1 2STR Ra, [Rb, imm] LDR Ra, [Rc, imm]1 2 3 4 5 6 7 8 9 10 11 12 13 14 15.data var1: .word 3 var2: .word 4 .text .global _start _start: ldr r0, adr_var1 @ 将存放var1值的地址adr_var1加载到寄存器R0中 ldr r1, adr_var2 @ 将存放var2值的地址adr_var2加载到寄存器R1中 ldr r2, [r0] @ 将R0所指向地址中存放的0x3加载到寄存器R2中 str r2, [r1, #2] @ 取址模式:基于偏移量。R2寄存器中的值0x3被存放到R1寄存器的值加2所指向地址处。 str r2, [r1, #4]! @ 取址模式:基于索引前置修改。R2寄存器中的值0x3被存放到R1寄存器的值加4所指向地址处,之后R1寄存器中存储的值加4,也就是R1=R1+4。 ldr r3, [r1], #4 @ 取址模式:基于索引后置修改。R3寄存器中的值是从R1寄存器的值所指向的地址中加载的,加载之后R1寄存器中存储的值加4,也就是R1=R1+4。 bkpt adr_var1: .word var1 adr_var2: .word var2
第二种偏移形式:寄存器作偏移
1 2STR Ra, [Rb, Rc] LDR Ra, [Rb, Rc]1 2 3 4 5 6 7 8 9 10 11 12 13 14.data var1: .word 3 var2: .word 4 .text .global _start _start: ldr r0, adr_var1 @ 将存放var1值的地址adr_var1加载到寄存器R0中 ldr r1, adr_var2 @ 将存放var2值的地址adr_var2加载到寄存器R1中 ldr r2, [r0] @ 将R0所指向地址中存放的0x3加载到寄存器R2中 str r2, [r1, r2] @ 取址模式:基于偏移量。R2寄存器中的值0x3被存放到R1寄存器的值加R2寄存器的值所指向地址处。R1寄存器不会被修改。 str r2, [r1, r2]! @ 取址模式:基于索引前置修改。R2寄存器中的值0x3被存放到R1寄存器的值加R2寄存器的值所指向地址处,之后R1寄存器中的值被更新,也就是R1=R1+R2。 ldr r3, [r1], r2 @ 取址模式:基于索引后置修改。R3寄存器中的值是从R1寄存器的值所指向的地址中加载的,加载之后R1寄存器中的值被更新也就是R1=R1+R2。 bx lr adr_var1: .word var1
第三种偏移形式:寄存器缩放值作偏移
1 2LDR Ra, [Rb, Rc, <shifter>] STR Ra, [Rb, Rc, <shifter>]1 2 3 4 5 6 7 8 9 10 11 12 13 14 15.data var1: .word 3 var2: .word 4 .text .global _start _start: ldr r0, adr_var1 @ 将存放var1值的地址adr_var1加载到寄存器R0中 ldr r1, adr_var2 @ 将存放var2值的地址adr_var2加载到寄存器R1中 ldr r2, [r0] @ 将R0所指向地址中存放的0x3加载到寄存器R2中 str r2, [r1, r2, LSL#2] @ 取址模式:基于偏移量。R2寄存器中的值0x3被存放到R1寄存器的值加(左移两位后的R2寄存器的值)所指向地址处。R1寄存器不会被修改。 str r2, [r1, r2, LSL#2]! @ 取址模式:基于索引前置修改。R2寄存器中的值0x3被存放到R1寄存器的值加(左移两位后的R2寄存器的值)所指向地址处,之后R1寄存器中的值被更新,也就R1 = R1 + R2<<2。 ldr r3, [r1], r2, LSL#2 @ 取址模式:基于索引后置修改。R3寄存器中的值是从R1寄存器的值所指向的地址中加载的,加载之后R1寄存器中的值被更新也就是R1 = R1 + R2<<2。 bkpt adr_var1: .word var1 adr_var2: .word var2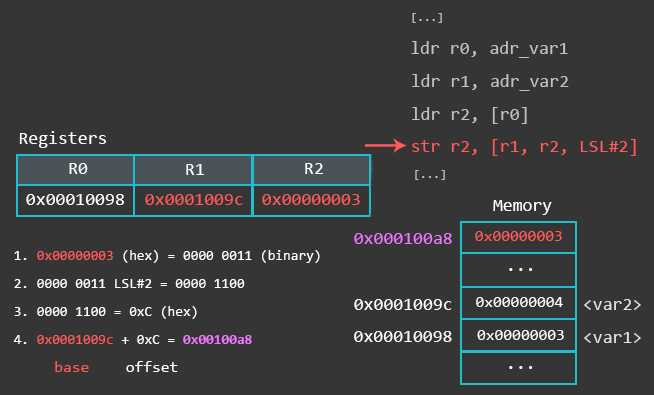
如何区分取址模式:
如果有一个叹号!,那就是索引前置取址模式,即使用计算后的地址,之后更新基址寄存器。
如果在外有一个寄存器,那就是索引后置取址模式,即使用原有基址寄存器重的地址,之后再更新基址寄存器
除此之外,就都是偏移取址模式了
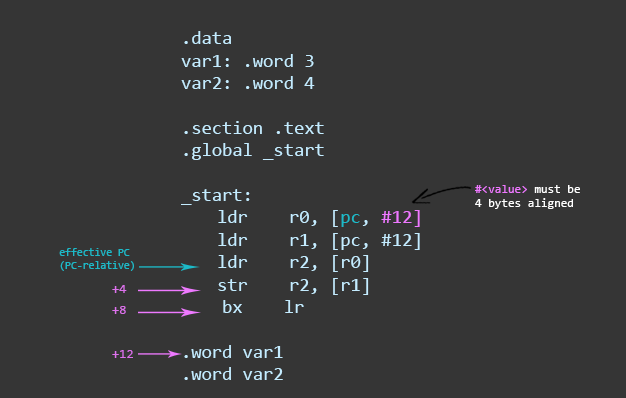
关于PC相对取址的LDR指令
有时候LDR并不仅仅被用来从内存中加载数据。还有如下这操作:
1 2 3 4 5 6 7 8.section .text .global _start _start: ldr r0, =jump /* 加载jump标签所在的内存位置到R0 */ ldr r1, =0x68DB00AD /* 加载立即数0x68DB00AD到R1 */ jump: ldr r2, =511 /* 加载立即数511到R2 */ bkpt这些指令学术上被称作伪指令。
在ARM中使用立即数的规律
在ARM中不能像X86那样直接将立即数加载到寄存器中。因为你使用的立即数是受限的。
立即数的值:v = n ror 2*r 有效的立即数都可以通过循环右移来得到
1 2 3 4 5 6 7 8 9 10#256 // 1 循环右移 24位 --> 256 #384 // 6 循环右移 26位 --> 384 #484 // 121 循环右移 30位 --> 484 #16384 // 1 循环右移 18位 --> 16384 #2030043136 // 121 循环右移 8位 --> 2030043136 #0x06000000 // 6 循环右移 8位 --> 100663296 (十六进制值0x06000000) Invalid values: #370 // 185 循环右移 31位 --> 31不在范围内 (0 – 30) #511 // 1 1111 1111 --> 比特模型不符合 #0x06010000 // 1 1000 0001.. --> 比特模型不符合这样并不能一次性加载所有的32位值。不过我们可以通过以下的两个选项来解决这个问题:
- 用小部分去组成更大的值。 MOV r0, #511 将511分成两部分:MOV r0, #256, and ADD r0, #255
1 2 3 4 5 6 7.section .text .global _start _start: mov r0, #256 /* 1 ror 24 = 256, so it's valid */ add r0, #255 /* 255 ror 0 = 255, valid. r0 = 256 + 255 = 511 */ ldr r1, =511 /* load 511 from the literal pool using LDR */ bkpt计算立即数的有效值脚本:https://raw.githubusercontent.com/azeria-labs/rotator/master/rotator.py
1 2 3 4 5 6 7azeria@labs:~$ python rotator.py Enter the value you want to check: 511 Sorry, 511 cannot be used as an immediate number and has to be split. azeria@labs:~$ python rotator.py Enter the value you want to check: 256 The number 256 can be used as a valid immediate number. 1 ror 24 --> 256下面的部分指令用到在详细查,记的话脑壳痛
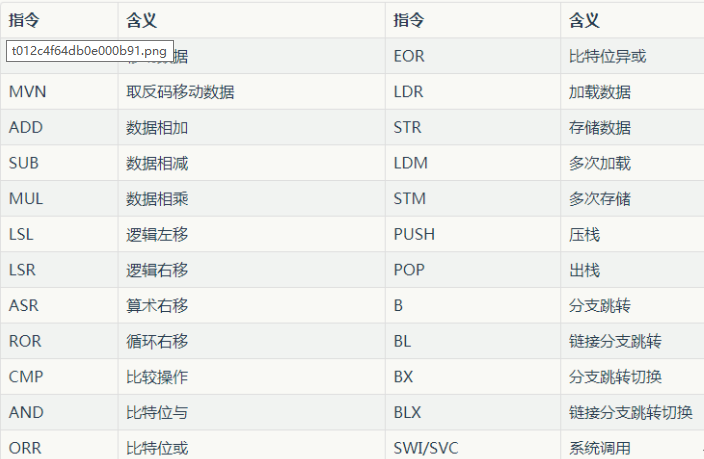
跳转指令
BBLBXBXL
存储器操作指令
LDMSTMPUSHPOPSWP
数据处理
MOVMVNADDADCSUBRSBSBCRSCMULMLSMLAUMULLUMLALSMUULLSMLALSMLADSMLSDSDIVUDIVASRANDORREORBICLSLLSRRRXRORCMPCMNTSLTEQ
其他指令
SWINOPMRSMSR